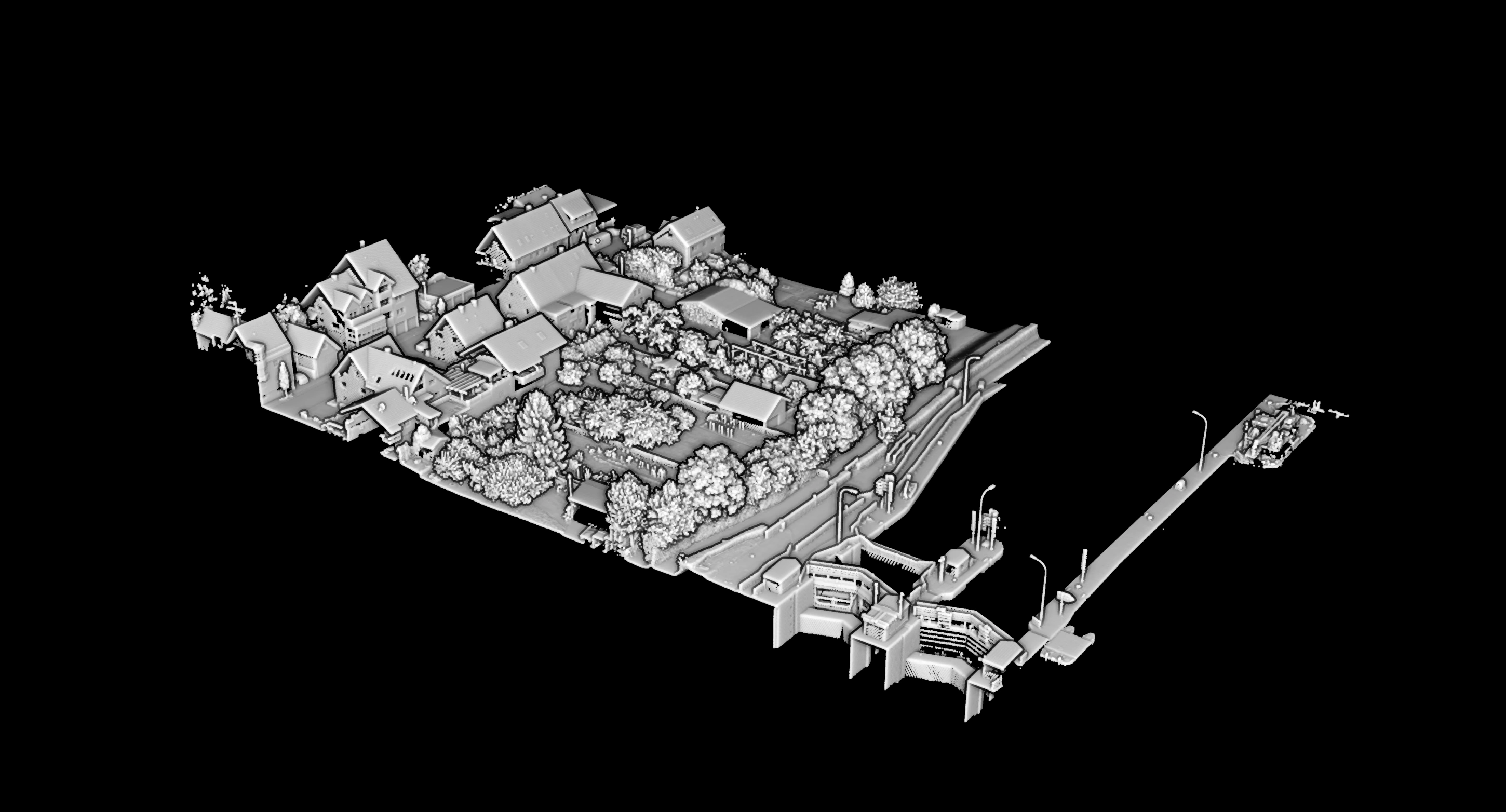
Nube en bruto
Nube de puntos 3D sin etiquetar. El color codifica intensidad de retorno LiDAR o elevación normalizada.
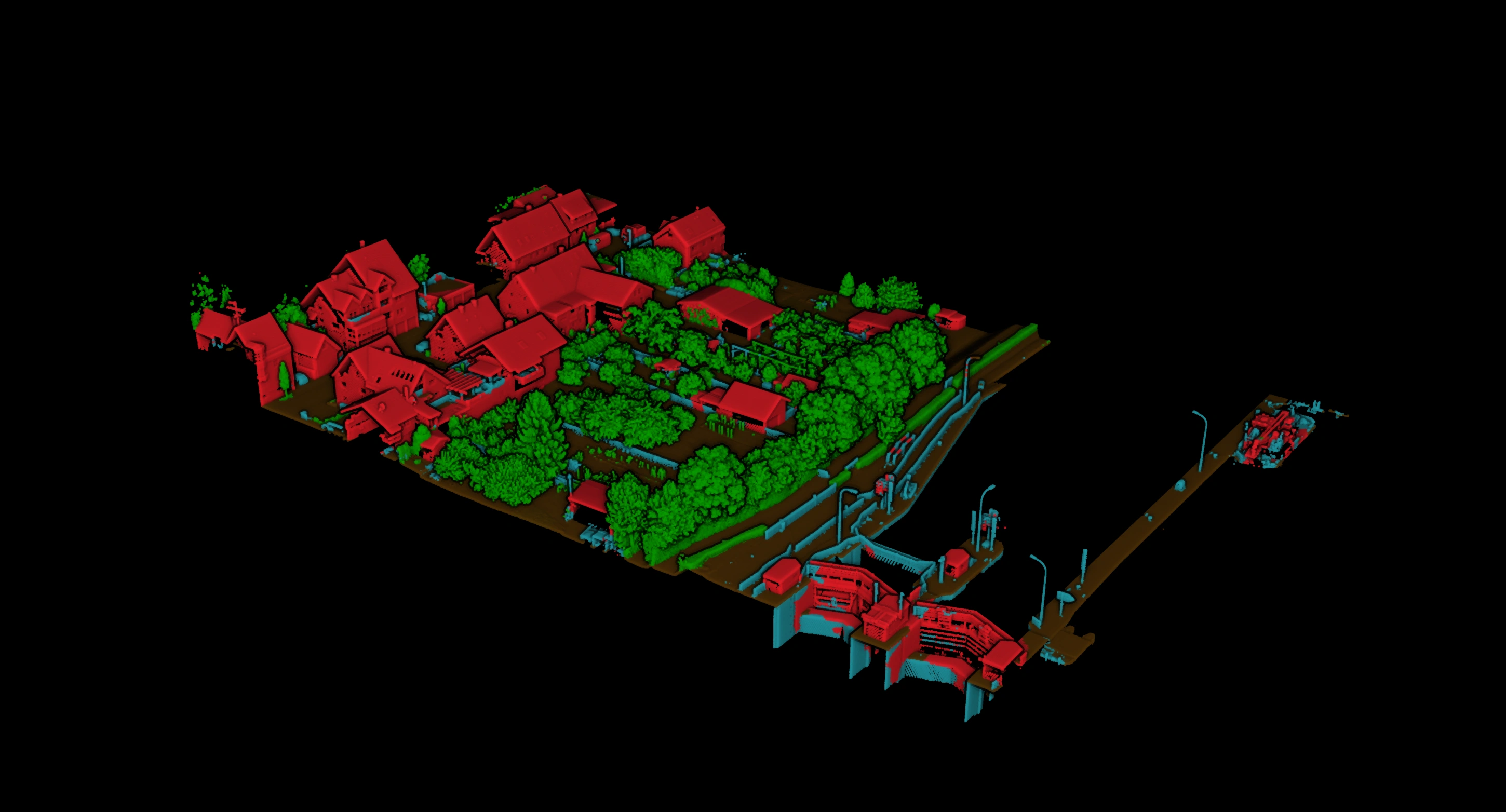
Máscara de error
Probabilidad de acierto por punto respecto al ground truth. Rojo = error probable. Blanco/gris = clasificación correcta.
Incertidumbre
Entropía de la distribución de probabilidades de clase por punto. Amarillo = máxima duda. Morado = alta confianza.
Ground truth
Etiquetado semántico manual validado por especialistas. Referencia contra la que se calculan todas las métricas del modelo.
Resultado final
Predicción del modelo sobre la nube completa. Cada punto tiene asignada su clase semántica. Output principal de VL3D++.