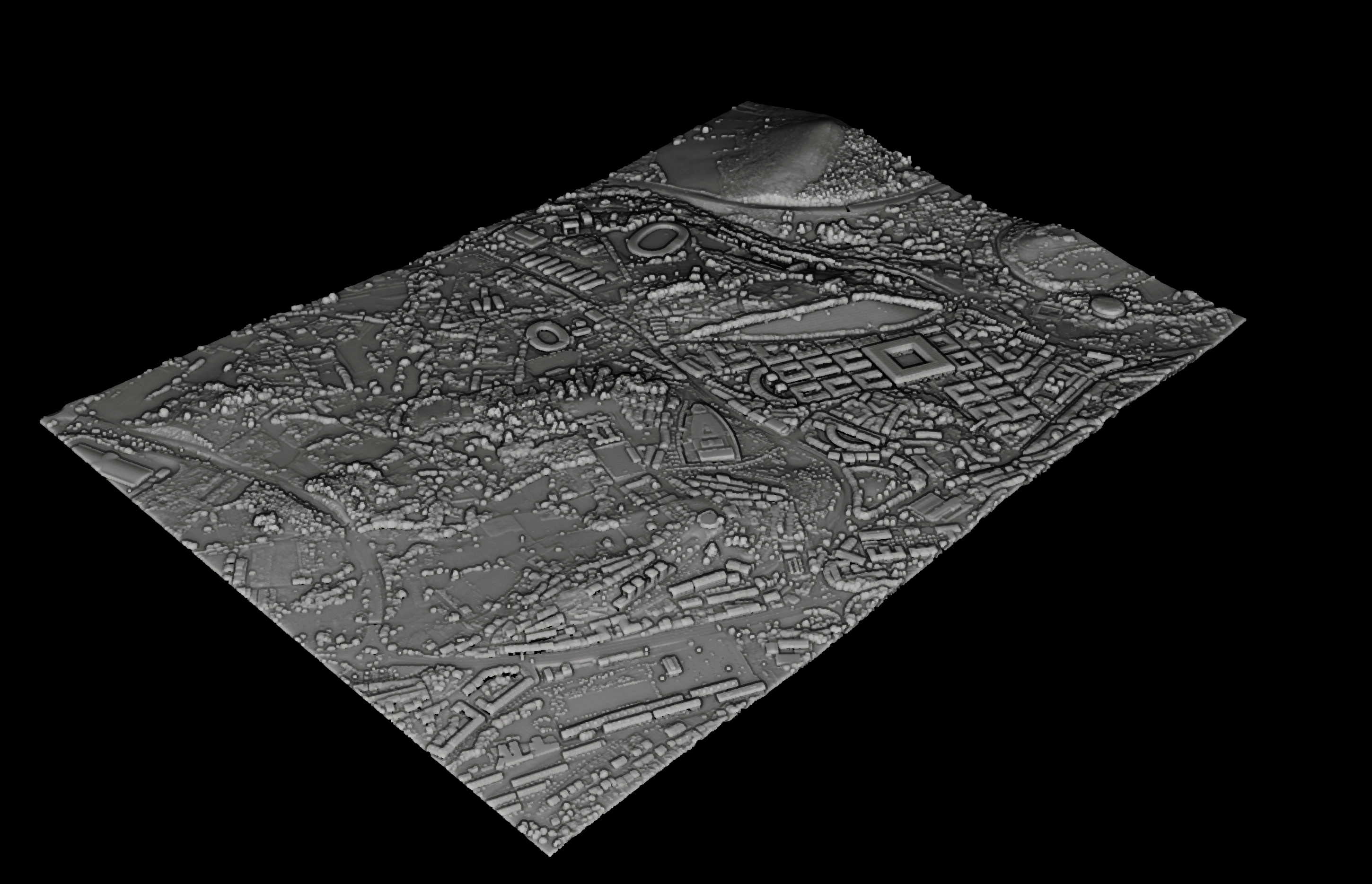
Raw point cloud
3D point cloud without labels. Colour encodes LiDAR return intensity or normalised elevation.
Error mask
Per-point classification accuracy vs ground truth. Red = likely error. White/grey = correct classification.
Uncertainty
Entropy of the predicted class probability distribution per point. Yellow = maximum doubt. Purple = high confidence.
Ground truth
Expert-validated semantic labelling. Reference against which all model metrics are computed.
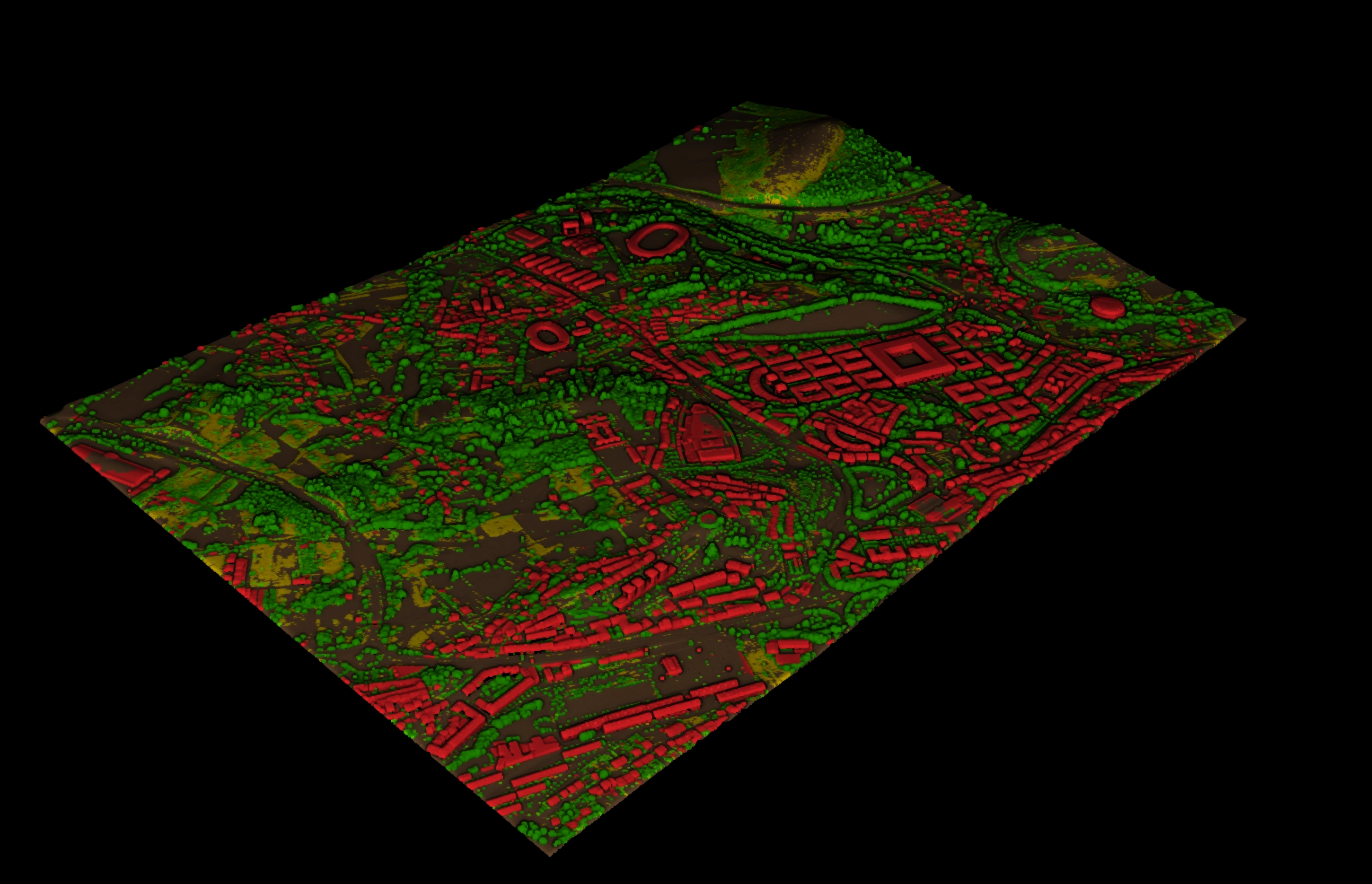
Final result
Model prediction over the entire cloud. Each point assigned its semantic class. Main VL3D++ output.