Applied research · Deep Learning · Open Source
VL3D++ is an open source framework to process and classify 3D point clouds, going from raw data to interpretable and quantifiable results. Visualise predictions, uncertainty, errors and metrics for millions of points automatically.
What is VL3D++

Designed to manage complete training and prediction pipelines, the framework integrates tools for data transformation, automatic feature extraction and rigorous evaluations that produce detailed analyses through automatic reports, metrics and visualisations.

Unlike conventional tools, our framework combines the power of C++ to process billions of LiDAR points with the agility of modern Deep Learning in Python.

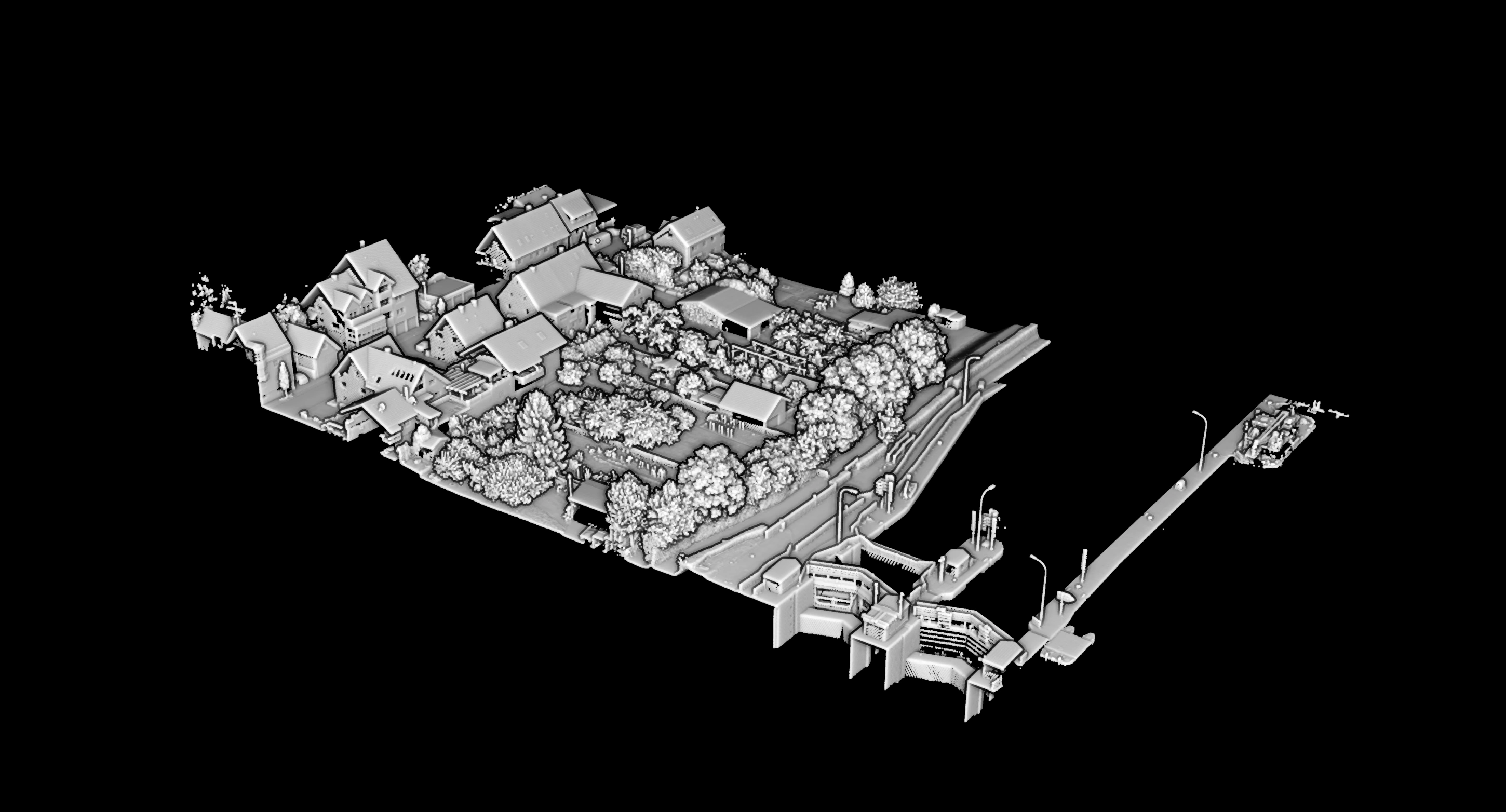
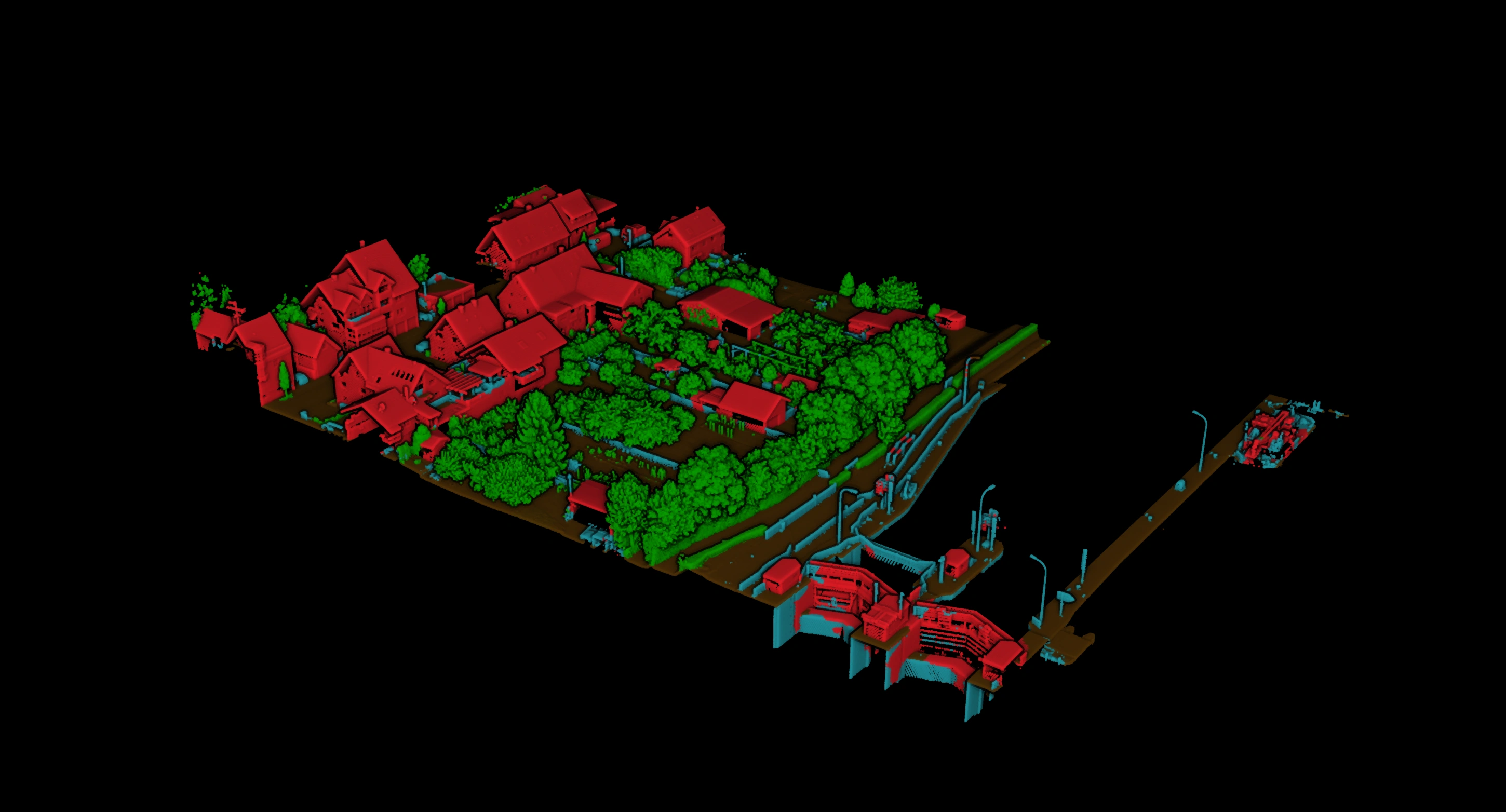
It is a complete solution that goes from automated preprocessing to advanced semantic segmentation, with clear visualisations at every stage. VL3D++ turns raw point clouds into intelligent digital twins and geospatial maps classified with scientific rigour.
Input
Process
Output
Designed to accelerate experimentation and deployment on 3D data.
Results evaluable with standard metrics and visual comparisons.
Different applications and use cases, from territorial analysis to biomedicine.
Analyses and classifies millions of raw points automatically with a proven 0,0% accuracy.
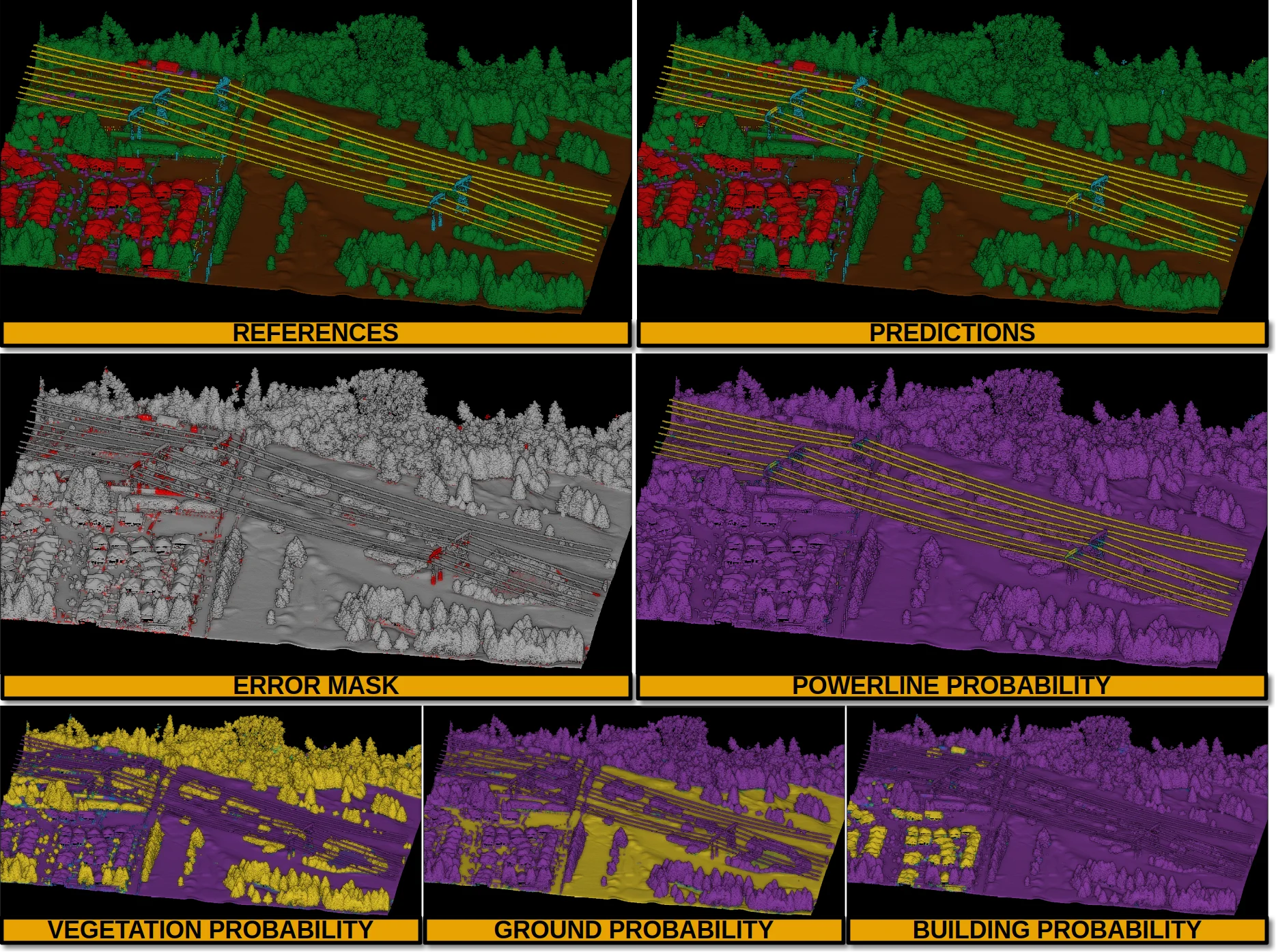
Inspect correct and incorrect predictions, and visualise per-class probability maps to understand model confidence and improve the pipeline.
One framework.
Many problems solved.
VL3D++ is developed as open source technology: repositories, documentation and reproducible examples to drive research, transfer and adoption.
 01
01Analysis of riverbeds and terrain behaviour.
Geomorphological classification for natural risk management.
 02
02Automatic volume calculation before and after blasts.
Accurate cubic-metre estimation for logistical planning and cost control.
 03
03Precise segmentation of structures in medical clouds.
Same framework applied to aneurysms and dental analysis.
 04
04Complete classification of terrain, vegetation and buildings.
Massive processing of LiDAR clouds to generate large-scale territorial information layers.
 05
05Detection of dangerous vegetation in power lines.
Automatic analysis of kilometres of network without manual inspection.
 06
06Estimation of available timber and forest mass.
Automatic quantification of resources across large areas.
Active learning
We start with a few already-classified clouds.
The model learns to recognise patterns in 3D.
It classifies new clouds and detects where it's unsure.
The expert only reviews those areas and the system improves.
The model learns, detects where it's unsure, the expert fixes errors and the system improves on its own.
 LearnsTriesDoubtsCorrectsLearns better
LearnsTriesDoubtsCorrectsLearns betterLess manual work. Better results. Every iteration improves the model.
See how it worksCompare results with the actual reference, visualise errors and analyse model confidence point by point.
Explore the demoCompare the classification generated by the model with the real classification point by point.
Visualise where the model has doubts and where it's wrong.
Every result comes with metrics that objectively measure the quality of the classification.
Collaboration, research and technology transfer
We foster an ecosystem of open innovation and continuous collaboration between academia and industry. Our technical and research team can guide you to explore how to apply VL3D++ to your case, collaborate on research or study technology-transfer pathways. Anyone interested in professional point cloud classification, or who needs the development of a specific technical functionality for their workflows, can contact our development team directly. We are open to joint research projects, technology transfer and advanced support for the implementation of the framework in production environments.






