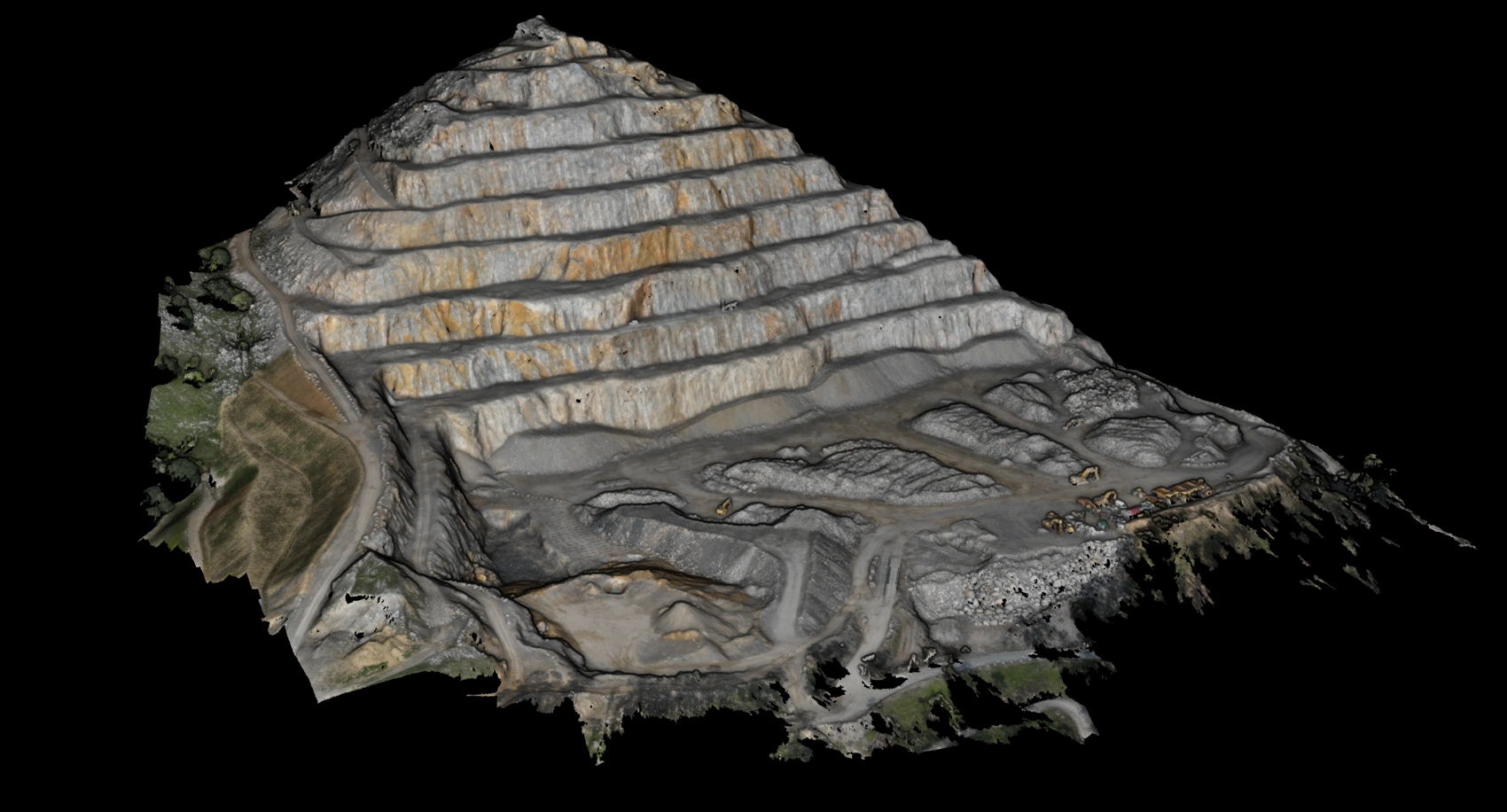
Vista RGB
Nube de puntos coloreada cos seus valores RGB reais (fotogrametría ou cámara co-rexistrada co LiDAR). Serve de contexto visual previo á análise do modelo.
Nube en bruto
Nube de puntos 3D sen etiquetar. A cor codifica a intensidade de retorno LiDAR ou a elevación normalizada.
Máscara de erro
Probabilidade de acerto por punto respecto ao ground truth. Vermello = erro probable. Branco/gris = clasificación correcta.
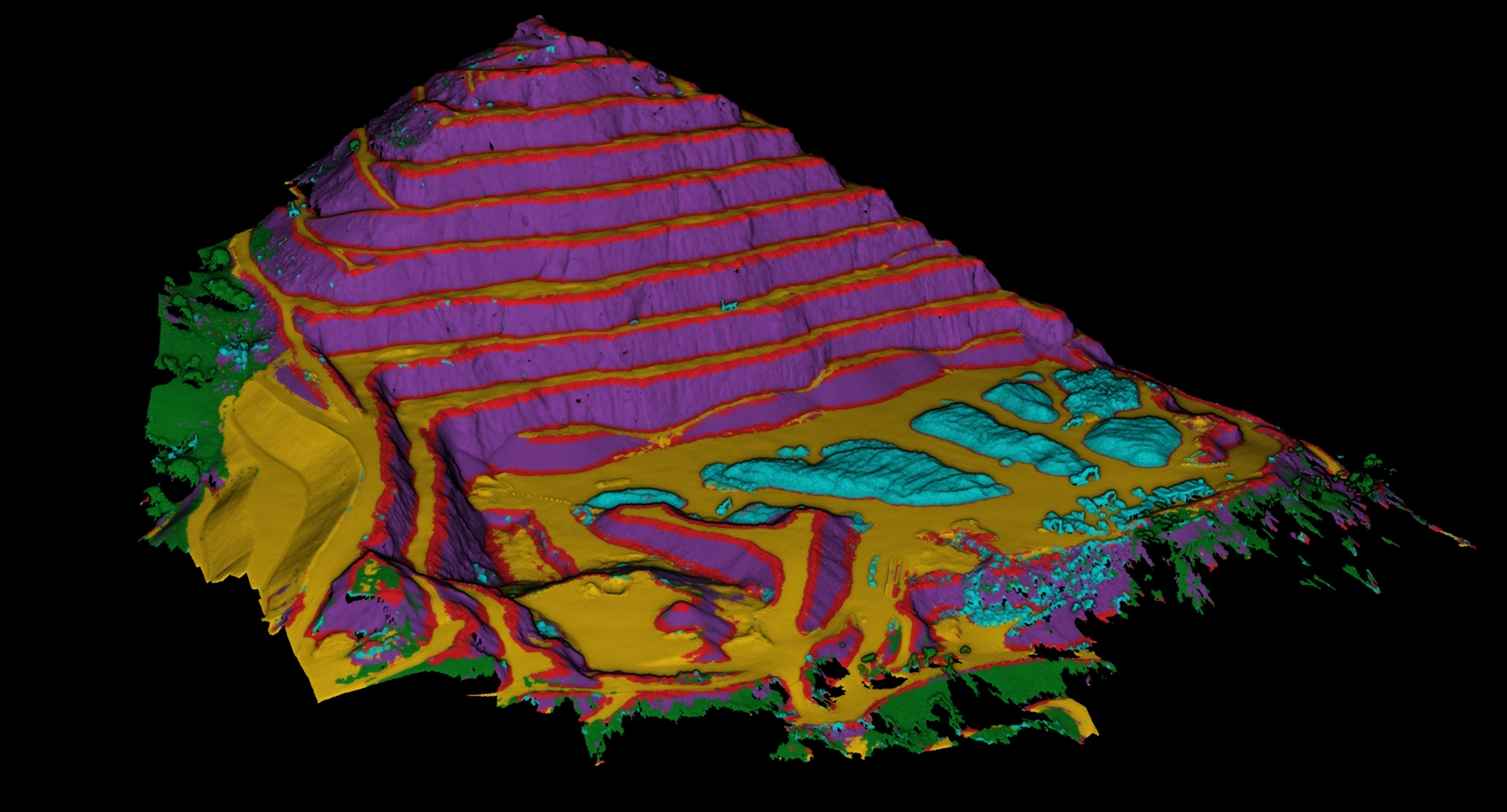
Incerteza
Entropía da distribución de probabilidades de clase por punto. Amarelo = máxima dúbida. Morado = alta confianza.
Ground truth
Etiquetado semántico manual validado por especialistas. Referencia contra a que se calculan todas as métricas do modelo.
Resultado final
Predición do modelo sobre a nube completa. Cada punto ten asignada a súa clase semántica. Output principal de VL3D++.